挑戦!
缶サット甲子園2009
無謀な挑戦!?、何から何まで初めて、つまずいてばかりの毎日でした。
1.パラシュートの作成
 |
まずはパラシュートの製作から。
6月末にエントリーし当初は「実際のパラシュートを真似すれば」とタカををくくっていました。
これが最初の”つまずき”だったのかもしれません。
大苦戦の始まりです。
|
厚紙を使って正八角形の型紙を切り出し、
それを利用しビニールを切ってパラシュートを試作してみました。
さらに市販の傘の流用も検討してみました。
 |
|
 |
 |
|
 |
 |
|
 |
試行錯誤の後ようやく満足のいくものが完成しました。
 |
|
 |
 |
|
 |
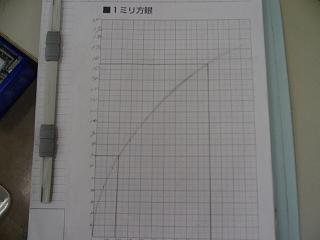
確かに缶サット本体には大きすぎると思いますが、モデルロケットのパラシュートを参考に「パラシュート径と重量」をグラフ化し理解しました。
本当に何から何まで解らない事だらけ・・・。でも勉強になりました。
|
 |
パラシュートの落下テストは本校4階コンピュータ室非常階段から行いました。
重りはペットボトル500ml2本、
”ふわりふわり”と落下、やっとパラシュートらしくなってきました。
ただし径が大きすぎるためか、横風にだいぶ流されました。
最終的にはバラシュート上部に穴をあけて対処するつもりです。
(穴の大きさは?まだ決まっていません。)
 |
|
 |
2.SunSPOTによるプログラム開発
SunSPOTも初めてならばJAVA言語も初めて・・・。一体どうなることやら。
頂いた「SunSPOTで始めるアプリケーションの簡単開発」「外部スイッチの制御」
「モータドライバでDCモータを制御する」の3冊のテキストで基礎学習を行いました。
その前にSunSPOTのインストールも大苦戦でした。
 |
|
 |
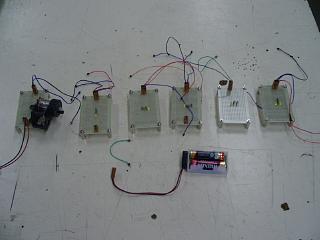
テキストにあった実習と製作基板
事前に理解していることは何一つ無かったので、各課題の回路を基板製作し、プログラミングの練習を行いました。(とにかく時間時間がありませんでした。)
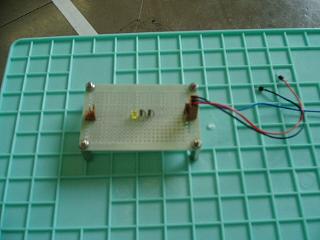
課題1
LEDをゆっくり点滅させる
|
 |
課題2
電源(3V)をセンサ-ボードから取る。
|
 |
課題3
LEDをゆっくり点滅させる
別のつなぎ方
|
 |
課題4
電源(3V)をセンサ-ボードから取る
|
|
課題5
マージされた回路
|
 |
課題6
モータをON/OFFする。
(使用FET2SK1282)
|
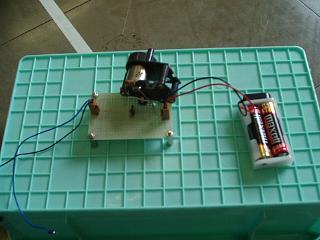 |
課題7
モータドライバでDCモータを制御する。
(モータドライバ TA8020)
|
 |
課題8
(基本入出力)
スイッチ入力 LED出力
|
 |
課題9
サーボモータ制御
|
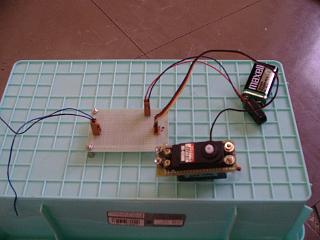 |
課題10
小型モータ制御
|
 |
3.缶サットキャリア製作
 |
「ロケットから放出された後自動で開放し缶サットを放出しなければならない」
紙管?ヒーター?一体何のこと?
またまた分からないことばかりに直面です。
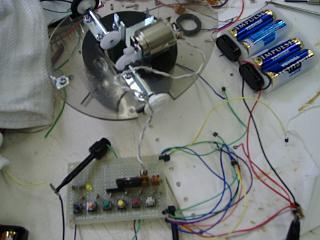
大会まで残り時間がないので校内にあった塩ビパイプを半分に切り、蝶番とバネ蝶番で形にしました。もちろん摩擦対策としてパイプ内部はフッ素コーティングしています。
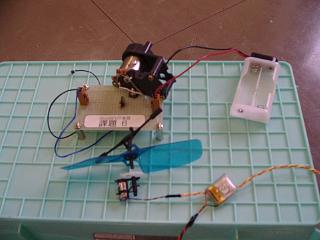
現状ではDCモータを回す技術しかありませんので、「モータでひもを巻き取りフックをはずす」という簡単な機構で製作しました。
開放のタイミングはsleep関数で調整です。
|
最終テスト終了
見事キャリア開きました。
これで大会出られるかな?
 |
|
 |
4.缶サット本体製作
 |
なっちゃん缶半分にカメラ・SunSPOT0を入れてみましたがダメみたいです。しょうがないのでカメラのフタ等を外し、ギリギリ入る(?)ようです。
これでやっと全体像が見えてきました。さて車検通るでしょうか?
そうか、無線機搭載しなければならない?
入るスペースどうしましょうか。
まだまだ完成には一山ありそうです。
ギリギリまで頑張るしかないようです。
|
5.まとめ
|


