マイクロマウス東北大会
2000
平成12年10月21日~22日の日程で第14回マイクロマウス東北大会が山形県長井市地場産業振興センターにおいて開催されました。エキスパートクラスには、東京からはロボコンマガジン執筆中の森永さんやWMMC OB山岸さん・WMMC・芝浦工大の多数の学生さんそして地元からはマウスの先生能登屋さんを始め過去最高の25台のエントリーがあり、大変賑やかな大会でした。
我々の今年の目標は「全員自作マウスでの出場・完走」でした。従来のマッピーキットを捨て、齋藤ファミリーマウスを含め計4台で望みましたが、今時はやらないウイングセンサマウスでの参加であり、見せ場のない大会となってしまいました。(単なる自己満足?)
しかしながら我々でもマウスを自作出来るということが分かっただけでも収穫はあったと思っています。果たして来年につながったのでしょうか?でもこのままの路線を続けてもねぇ・・・・・。
今年度自作1号機
「あるまone」
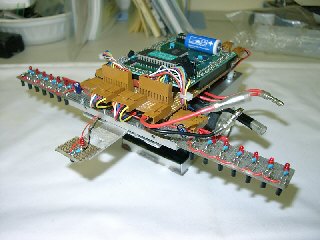 |
製作者 1年大内 誠也君
モータドライブボードは2年生に作ってもらいましたが、センサ回路を自作しマスウを製作してくれました。(ちなみに今年3台のマウスのセンサ回路は全て彼の製作でした。)本来であればフレッシュマンクラスへのエントリーを予定していたのですが、当初より最も安定走行していたので、あえてエキスパートクラス出場となりました。大会では1年生ながら大健闘でした。
結果
完走 第6位 タイム 18秒
幸運にも第2走行が1回決まりました。
|
CPU Super Aki-80
開発言語 アセンブラ
ドライバボード 定電圧駆動回路
モータ 三洋電気×2
タイヤホイール 東日本支部標準品
タイヤ 卓球ラバー
センサ 横壁用 反射型位置センサ 両ウイング各7個
前壁用 ロボット相撲用対物センサ1個
ターンポイント検出用 フォトセンサ1個
探査方法 ピボットターン連続探査
アルゴリズム 求心法
齋藤ファミリー用マウス
「うさぎ00」
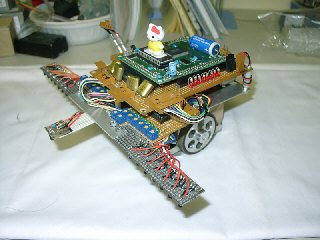 |
初代製作者 鈴木 康弘君
メンテナンス 齋藤ファミリー
今年3月卒業したOB鈴木君の去年リタイヤしたマウスを引き継ぎ、悲願の完走を果たしました。
結果
完走 第7位
タイム1分21秒
残念、第2走行決まらず。
|
CPU Super Aki-80
開発言語 アセンブラ
ドライバボード 定電圧駆動回路(東日本支部標準遵守)
モータ シナノケンシ×2
タイヤホイール マッピーキットのものを流用
タイヤ 生ゴム(輪ゴム)
センサ 横壁用 反射型位置センサ 両ウイング各7個
前壁用 ロボット相撲用対物センサ1個
ターンポイント検出用 フォトセンサ1個
探査方法 ピボットターン連続探査
アルゴリズム 求心法
今年度自作3号機
「あるまthree」
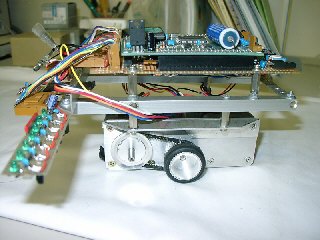 |
製作者 2年源間 正人君
ベルトドライブマウスとして第2
走行で「斜め走行」を目標に製作しましたが、ロボット相撲との競合もあり今回は目標の半分と言ったところです。
前日に第2走行のソフトコンバージョンするなど、とにかく時間が足りませんでした。しかし良く完走したものだ。前日の夜9時の段階では、やっと探査が出来る状態でしたから。
結果
完走 第8位 タイム 2分14秒(未確認)
第2走行は決まりませんでした。
|
CPU Super Aki-80
開発言語 アセンブラ
ドライバボード 定電圧駆動回路
モータ 三洋電気×2
タイヤホイール 東日本支部標準品
タイヤ ミニ四駆タイヤ
センサ 横壁用 反射型位置センサ 両ウイング各7個
前壁用 ロボット相撲用対物センサ1個
ターンポイント検出用 フォトセンサ1個
探査方法 ピボットターン連続探査
アルゴリズム 求心法
今年度自作2号機
「あるまtwo」
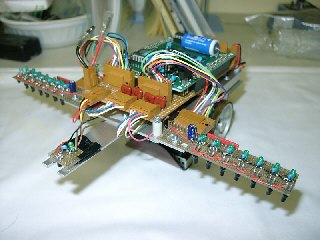 |
製作者 1年向田 善弘君
ドライバボードが焼けたり、モータさらにはタイヤも交換するなど不運・トラブル続きのマウスでした。
大会では探査方法の一覧を披露しました。
結果
残念 リタイヤ
|
CPU Super Aki-80
開発言語 アセンブラ
ドライバボード 定電圧駆動回路
モータ シナノケンシ×2
タイヤホイール マッピーキットのものを流用
タイヤ 生ゴム(輪ゴム)
センサ 横壁用 反射型位置センサ 両ウイング各7個
前壁用 ロボット相撲用対物センサ1個
ターンポイント検出用 フォトセンサ1個
探査方法 ピボットターン連続探査
アルゴリズム 求心法

|